


(사진설명: 천궁1호와 신주9호의 수동도킹의 지휘센터)
6월 24일 13시경, 중국 우주인은 신주 9호 우주선과 천궁1호 목표비행물에 대해 수동 도킹을 실시하는데 성공했습니다.
중국은 이번에 처음 우주인이 수동으로 우주선을 조종하여 교차도킹을 진행했으며 이는 중국이 우주비행체 유인교체도킹의 핵심기술을 장악하였 다는 것을 의미합니다.
24일 11시경, 신주 9호는 자동으로 천궁1호와 400미터 떨어진 곳으로 철거하였다가 다시 목표비행물을 향해 자동 접근을 실시하여 120미터 떨어진 정박점까지 갔습니다.
약 50분후 지면의 과학기술인원은 우주인에게 수동통제 도킹지령을 발송하고 우주선의 통제모식을 수동통제로 바꿨습니다.
기자가 베이징비행통제센터 스크린에서 관찰한데 의하면 우주인 경해붕(景海鹏), 류왕(刘旺), 류양(刘洋)은 모듈내에서 일련의 도킹준비를 하고 장비를 정리하며 자세를 조절하였습니다.
가운데 앉은 우주인 류왕이 평형이동 조종대와 자세 조종대를 시험조작하기 시작하였으며 베이징센터는 도킹 준비상황을 최종 확인한뒤 우주인에게 수동통제 도킹 권한을 부여했습니다.
우주인 류왕은 평형이동 조종대와 비행자세 조종대를 계속 조절하여 신주9호 우주선을 통제하였으며 신주 9호와 천궁 1호의 도킹환이 가볍게 접촉했습니다.
이어 포획, 완충, 교정, 복귀 등 기술동작을거쳐 신주 9호 우주선과 천궁 1호 목표비행물은 하나의 조합체로 연결되였습니다.
소개에 따르면 수동도킹은 기술이 새롭고 안전기준이 높으며 연관된 분야가 많고 천지간의 협력에 대한 요구가 높습니다.
천궁 1호와 신주 9호 조합체는 우주에서 4일간 비행한 뒤 우주인의 수동통제에 의해 분리되며 그 다음날 귀환하게 됩니다.
자동통제와 수동통제는 국제적으로 우주비행체에 대해 공간도킹을 실시하는 두가지 수단입니다.
두가지 수단에 대한 검증을 거쳐야만 우주도킹 기술을 완전히 장악하였다고 할수 있습니다.
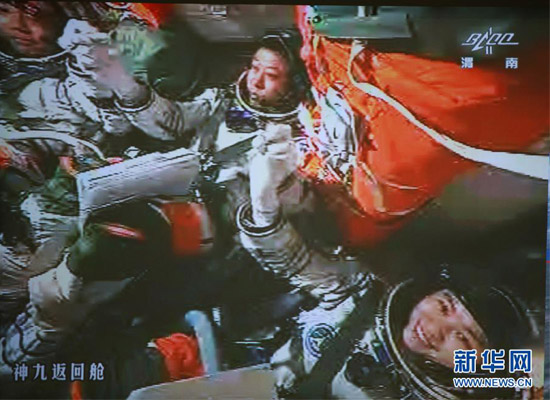
(사진설명: 수동도킹중의 신주9호내부)
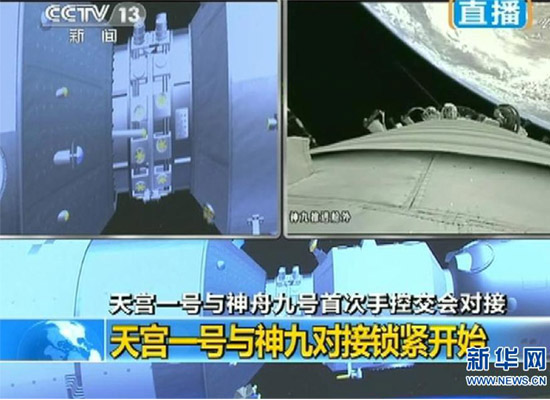
(사진설명: 수동도킹중 천궁1호와 신주9호)
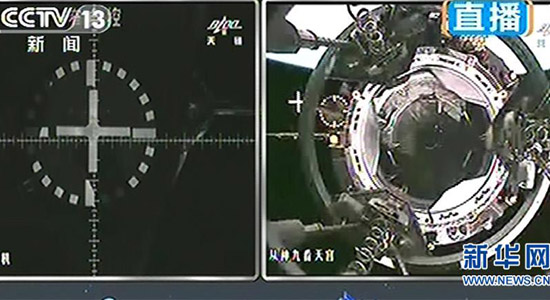
(사진설명: 수동도킹중의 천궁1호와 신주9호)
